Praktyki zawodowe to nieodłączna część procesu edukacyjnego. To ważny czas, szczególnie podczas studiów inżynierskich, ponieważ pozwala na zdobycie cennego doświadczenia i sprawdzenia swojej wiedzy oraz umiejętności w środowisku produkcyjnym. Nie inaczej było w przypadku praktyk, które odbyli goszczący u nas studenci z Akademii Górniczo-Hutniczej oraz Politechniki Krakowskiej. W ramach miesięcznych praktyk wzięli oni udział w szkoleniach i wspierali działy konstrukcji maszyn oraz robotyki w bieżących działaniach. Jednak jednym z praktycznych zadań jakie dla nich przygotowaliśmy była realizacja projektu polegającego na stworzeniu chwytaka do robota oraz opracowaniu zrobotyzowanego procesu kompletowania i pakowania butelek. Jak sobie poradzili z tym zadaniem?

 Fot. Stanowisko zrobotyzowane do kompletowania i pakowania butelek
Fot. Stanowisko zrobotyzowane do kompletowania i pakowania butelek
W lipcu do firmy ATMAT dołączyło dwóch praktykantów: Krzysztof Struski oraz Grzegorz Tryniecki, studenci Akademii Górniczo-Hutniczej i Politechniki Krakowskiej, którzy kształcą się na kierunkach:
- Inżynieria mechatroniczna
- Mechanika i budowa maszyn
W ramach praktyk jednym z ich zadań było opracowanie testowego stanowiska zrobotyzowanego do kompletowania i pakowania butelek. Do dyspozycji otrzymali stanowiska komputerowe wraz z niezbędnym oprogramowaniem, stanowisko zrobotyzowane wyposażone w przemysłowego robota marki FANUC, możliwość skorzystania z drukarek 3D ATMAT do wytworzenia elementów do chwytaka, wszelkie niezbędne narzędzia montażowe i podzespoły (siłowniki, śruby) oraz wsparcie mentorskie inżynierów i specjalistów ATMAT.
Projekt miał na celu umożliwienie studentom technicznych kierunków praktyczną pracę w środowisku produkcyjnym w zakresie:
- projektowania,
- tworzenia symulacji komputerowych,
- wytwarzania i montażu elementów stanowiska,
- praktycznego wykorzystania technologii druku 3D,
- programowania robotów przemysłowych,
- pracy w zespole.
Jaki zakres prac zrealizowali praktykanci?
Sekcja projektowania:
1. Zapoznanie z tematem oraz pierwsze założenia dotyczące chwytaka (łapanie butelki przy użyciu siłownika pneumatycznego).
2. Pomiar rozstawu otworów na głowicy robota, które umożliwiły montaż chwytaka.
3. Wykonanie projektu butelki na podstawie wymiarów rzeczywistych obiektu.
4. Omówienie dokładnych założeń dot. chwytaka i powstanie schematu kinematycznego.
5. Projekt podstawy, która montowana jest do głowicy robota.
6. Pomiar siłownika pneumatycznego i zaprojektowanie jego mocowania.
7. Zaprojektowanie elementów, które dzięki mocowaniu do podstawy umożliwią montaż ramion ruchomych chwytaka.
8. Projekt ramion ruchomych chwytaka.
9. Projekt elementu łączącego siłownik pneumatyczny z ramionami ruchomymi.
10. Projekt szczęk, które umożliwiają właściwe i stabilne trzymanie butelki przez chwytak.
11. Przegląd szczegółowy elementów i sprawdzenie wymiarów.
12. Wygenerowanie modeli, które umożliwią druk 3D.
13. Montaż chwytaka z powstałych na drukarce 3D części.
14. Testy chwytaka na stanowisku zrobotyzowanym.

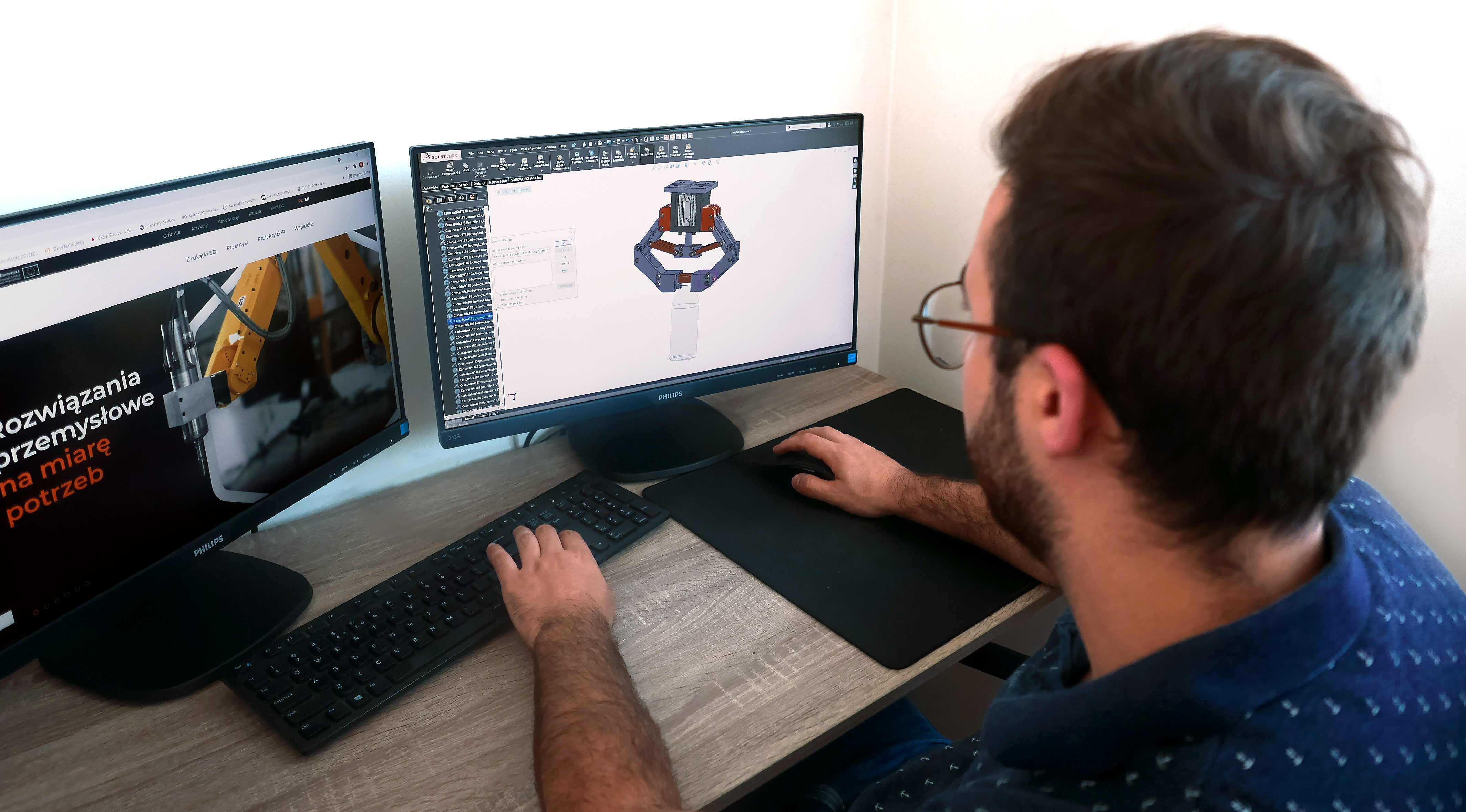 Fot. Projektowanie chwytaka do robota przemysłowego
Fot. Projektowanie chwytaka do robota przemysłowego
Sekcja robotyki:
1. Opracowanie koncepcji wykonania projektu w zespole.
2. Opracowanie symulacji w programie ROBOGUIDE:
a) wyznaczenie układów odniesienia dla robota,
b) zdefiniowanie modeli 3D potrzebnych do symulacji,
c) opracowanie programów umożliwiających ich łatwą parametryzację,
d) programowanie trajektorii poruszania się robota:
- zapisanie pozycji punktów definiujących trajektorię ruchu,
- zdefiniowanie macierzy punktów pośrednich,
- deklarowanie zmiennych,
e) wykonywanie testowych symulacji sprawdzających poprawność działania programu,
f) nanoszenie poprawek.
3. Przygotowanie stanowiska robota:
a) montaż układu pneumatycznego oraz elektrycznego do chwytaka,
b) wgranie do robota opracowanych programów.
4. Realizacja projektu na robocie FANUC M-20iA/35M:
a) zdefiniowanie układu odniesienia dla stołu oraz zaprojektowanego chwytaka,
b) zaktualizowanie zdefiniowanych punktów w oparciu o rzeczywiste stanowisko,
c) opracowanie programów sterujących chwytakiem (otwieranie/zamykanie),
c) testowanie programu:
- dobór odpowiednich prędkości poruszania się robota,
- nanoszenie poprawek w pozycjonowaniu,
- obserwacja poprawności wykonywania zadanych sekwencji ruchu.
5. Końcowe testowanie programu przez robota w trybie z pełną szybkością poruszania się przez robota.
 Fot. Programowanie robota przemysłowego
Fot. Programowanie robota przemysłowego
Jak wygląda finalny zrobotyzowany proces?
- Robot pobiera butelkę z wodą z punktu wyjściowego i umieszcza w zaplanowanym miejscu na stole roboczym.
- Robot według uprzednio zaprogramowanej sekwencji ruchów układa butelki w formie napisu.
- Po zakończonym procesie kompletowania butelek robot rozpoczyna pakowanie ich do kartonu.
Opracowane stanowiska wraz z całym procesem tworzenia elementów i programowania można zobaczyć na poniższym filmie.
Wsparcie merytoryczne w zakresie Robotyki i Automatyki: Witold Badura, Norbert Polek
Wsparcie merytoryczne w zakresie Projektowania, Wytwarzania i Druku 3D: Artur Gęgotek, Dariusz Szafraniec oraz Piotr Golonka